Specification:
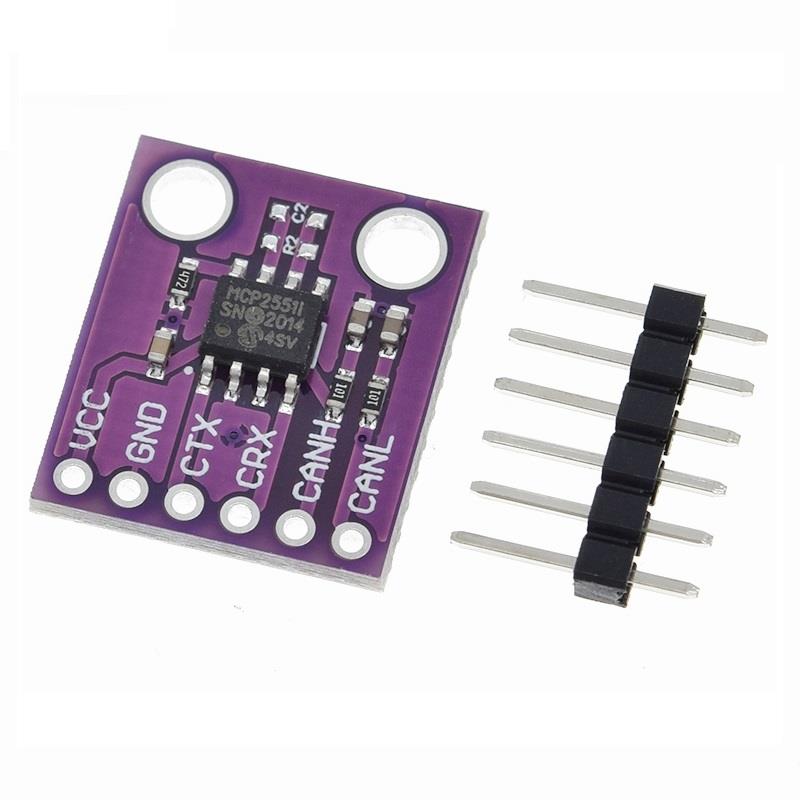
The MCP2551 module is a fault tolerant high-speed CAN device that acts as a CAN protocol controller and a physical bus interface.
The MCP2551 provides differential transceiver capability for the CAN protocol controller, which fully complies with the ISO-11898 standard, including 24V voltage requirements.
Typically, each node on the CAN system must have a device that converts the digital signal generated by the CAN controller into a signal suitable for bus transmission.
It also adds buffers between the CAN controller and the high voltage spikes on the CAN bus, which may be generated by external devices.
Support 1MB / S operating rate.
Meet the ISO-11898 standard physical layer requirements.
Suitable for 12V and 24V systems. Slope External Control, Reduced RFI.
Automatically detects a ground fault at the TXD input.
Power-on reset and voltage event undervoltage protection.
No power-up node or undervoltage does not affect the CAN bus.
Low current standby operation.
Up to 112 nodes can be connected.
Package includes:
1 X MCP2551 High-speed CAN Protocol Controller Bus Interface Module For Arduino
Note: all the descriptions and prices are subject to change without prior notice.
Free Shipping: No
Shipping Weight/Unit(g): 0.00
Std. Packing Qty. (pcs): 1








![SMD LED 0805 Red Ultra Bright Light Emitting Diode LED Lamp [100pcs Pack]](/upload/202509/24/202509241509494265.jpg)
![SMD LED 0805 Green Ultra Bright Light Emitting Diode LED Lamp [100pcs Pack]](/upload/202509/24/202509241504271305.jpg)